Many suggested tools and platforms have been proposed to help humanity overcome the various global problems and crises, each with claims of superior ability or adequacy for addressing the ‘wickedness’ of the problems.
Two of the main perspectives I have studied – the general group of models labeled as ‘systems thinking’, ‘systems modeling and simulation’, and the ‘argumentative model of planning’ proposed by H. Rittel (who incidentally saw his ideas as part of a ‘second generation’ systems approach) have been shown to fall somewhat short of those claims: specifically, they have so far not been able to demonstrate the ability to adequately accommodate each others’ key concerns. The typical systems model seems to assume that all disagreements regarding its model assumptions have been ‘settled’; it shows no room for argument and discussion or disagreement, while the key component of the argumentative model: the typical ‘pro’ or ‘con’ argument of the planning discourse, — the ‘standard planning argument’ does not connect more than two or three of the many elements of a more elaborate systems model of the respective situation, and thus fails to properly accommodate the complexity and multiple loops of such models.
It is of course possible that a different perspective and approach will emerge that can better resolve this discrepancy. However, it will have to acknowledge and then properly address the difficulty we can now only express with the vocabulary of the two perspectives. This essay explores the problem of showing how the elements of the two selected approaches can be related in maps that convey both the respective system’s complexity and the possible disagreements and assessment of the merit of arguments about system assumptions.
A first step is the following simplified diagram template that shows a ‘systems model’ in the center, with arguments both about how the proposal for intervention in the system (consisting of suggested actions upon specific system elements) should be evaluated, and about the degree of certainty – the suggested term is ‘plausibility’ – about assumptions regarding individual elements.
A key aspect of the integration effort is the insight that the ‘system’ will have to include all the features discussed in the discourse under the terms of ‘plan proposal’ with its details of initial conditions, proposed actions (what to do, by whom, using what tools and resources, and the conditions for their availability), the ‘problem’ a solution aims at remedying, which is described (at least) by specifying its current ‘IS’ state, the desired ‘OUGHT’ state or planning outcome, the means by which the transition of is- to ought-state can be achieved; and the potential consequences of implementing the plan, including possible ‘unexpected’ side-and-after-effects. Conversely, the assessment of arguments (the “careful weighing of pros and cons”) will have to explicitly address the system model elements and their interactions – elements that should be (but mostly are not) specified in the argument as ‘conditions under which the plan or one of its features is assumed to effectively achieve the specific outcome or goal referenced by the argument.
For the sake of simplicity, the diagram only shows two arguments or reasons for or against a proposed plan. In reality, there always will be at least two arguments (benefit and cost of a plan), but usually many more, based on assessment of the multiple outcomes of the plan and actions to implement it, as well as of conditions (feasibility, availability, cost and other resources) for its implementation. The desirability assessments of different parties will be different; the argument seen as ‘pro’ by one party can be a ‘con’ argument for another, depending on the assessment of the premises. Therefore, arguments are not shown as pro or con in the diagram.
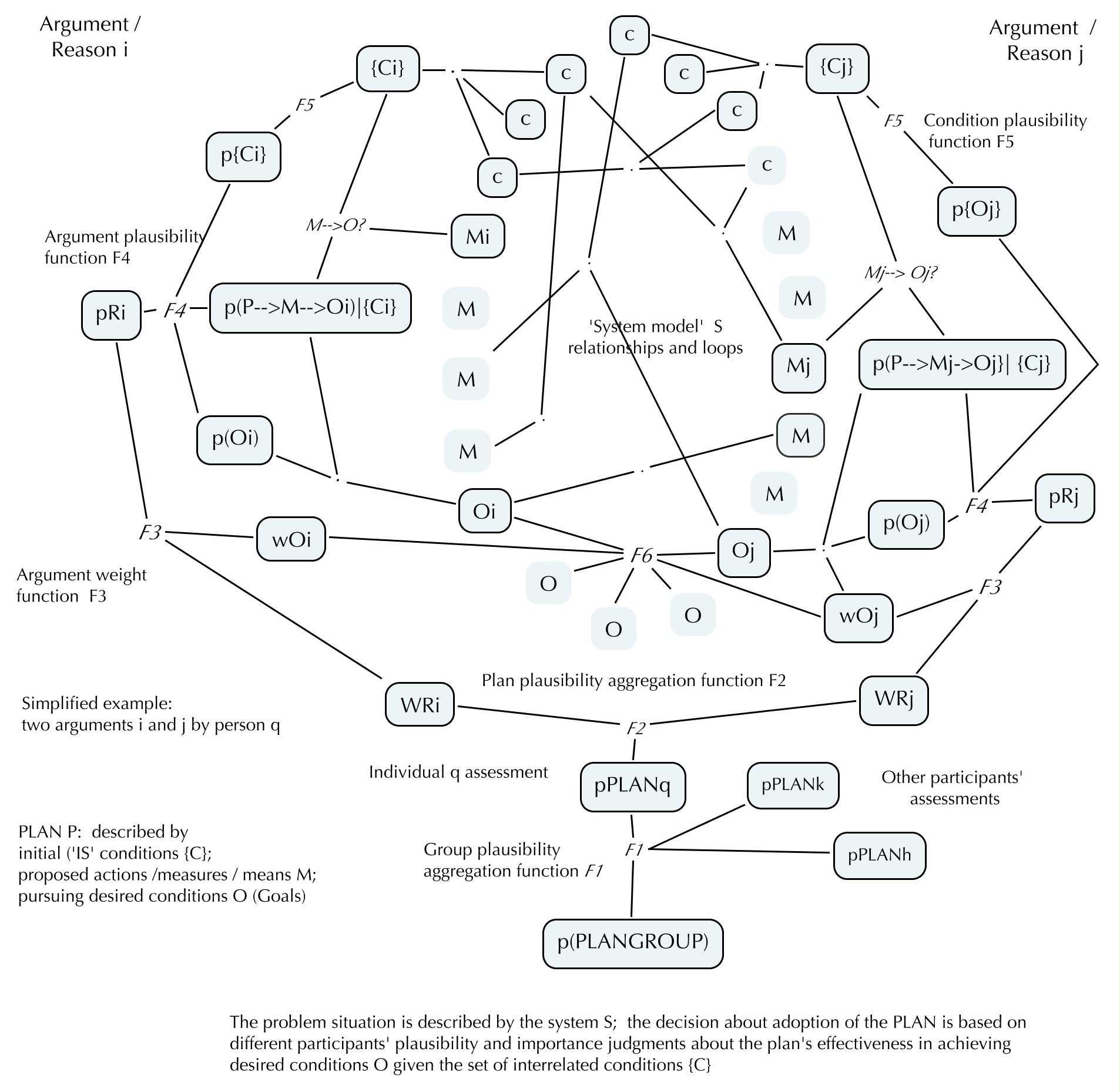
The diagram uses abbreviated notations for conciseness and convenient overview that are explained in the legend below, that presents some key (but by no means exhaustively comprehensive) concepts of both perspectives.
* PLAN or P Plan or proposal for a plan or plan aspects
* R Argument or ‘reason’. It is used both for an entire ‘pro’ or ‘con’ argument about the plan or an issue, — the entire set of premises supporting the ‘conclusion’ claim (usually the plan proposal) and for the relationship claimed to connect the Plan with an effect, usually a goal, or a negative consequence of plan implementation, in the factual-instrumental premise.
The ‘standard planning argument’ pattern prevailing in planning discourse has the general form:
D(PLAN) Plan P ought to be adopted (deontic ‘conclusion’)
because
FI (PLAN –>R –>O)|{C} P has relationship R with outcome O given
Conditions {C} (Factual-instrumental premise)
and
D(O) Outcome O ought to be pursued (Deontic premise)
and
F{C} Conditions {C} are given (true)
The relationship R is most often a causal connection, but also stands for a wide variety of relationships that constitute the basis for pro or con arguments: part-whole, identity, similarity, association, analogy, catalyst, logical implication, being a necessary or sufficient condition for, etc. In an actual application, these relationships may be distinguished and identified as appropriate.
* O or G Outcome or goal to be pursued by the plan, but also used for other effects including negative consequences
* M — the relationship of P ‘being a means’ to achieve O
* C or {C} The set of a number of
c conditions under which the claimed relationship M between P and O is assumed to hold
* pl ‘plausibility’ judgments about the plan, arguments, and argument premises, expressed as values on a scale of +1 (completely plausible) to -1 (completely implausible) with a midpoint ‘zero’ understood as ‘so-so or ‘don’t know, cant decide’) in combination with the abbreviations for those:
* plPLAN or plP plausibility judgment of the PLAN,
this is some individual’s subjective judgment.
* plM plausibility of P being effective in achieving O;
* pO plausibility of an outcome O or Goal;
* pl{C} plausibility (probability) of conditions {C} being present;
* plc plausibility of condition c being present;
* plR plausibility of argument or reason R;
* pl PLAN GROUP a group judgment of plan plausibility
* wO weight of relative importance of outcome O ( 0 ≤ w ≤ 1; ∑w = 1)
* WR Argument weight or weight of reason
Functions F between plausibility values:
* F1 Group plausibility aggregation function:
n
pl PLANGROUP = F1 (plPLANq) for all n members q of the group
q=1, 2
* F2 Plan plausibility function:
m
Pl(PLAN)q = F2 (WRi) for all m reasons R, by person q
i = 1,2…
* F3 Argument weight function:
WRi = F3 pl Ri)* wOj
* F4 Argument plausibility function:
Pl(Ri) = F4: {pl(P –>Mi –>Oi)|{Ci}) , pl(Oi), pl{C}}
The plausibility of argument R is a function of all
Premise plausibility judgments
* F5 Condition set plausibility function:
Pl{C} = F5 (pl ck) pl of set {C} is a function of the
K = 1,2… plausibility judgmens of all c in the set.
n
* F6 Weight of relative importance of outcome Oi: wOi = 1/n ∑ vOi
i=1,2…
Subject to conditions 0 ≤ wOi ≤ 1, and ∑wO = 1.
* System S The system S is the network of all variables describing both the initial conditions c (the IS-state of the problem the plan is trying to remedy), the means M involved in implementing the plan, the desired ‘end’ conditions or goals G of the plan, and the relationships and loops between these.
The diagram does not yet show a number of additional variables that will play a role in the system: the causes of initial conditions (that will also affect the outcome or goal conditions; the variables describing the availability, effectiveness, costs and acceptability of means M, and potential consequences of both M and O of the proposed plan. Clearly, these conditions and their behavior over time (both the time period needed for implementation, and the assumed planning horizon or life expectancy of the solution) will or should be given due consideration in evaluating the proposed plan.

